NOTÍCIAS DE MERGULHO
Agora os robôs oceânicos voam sozinhos

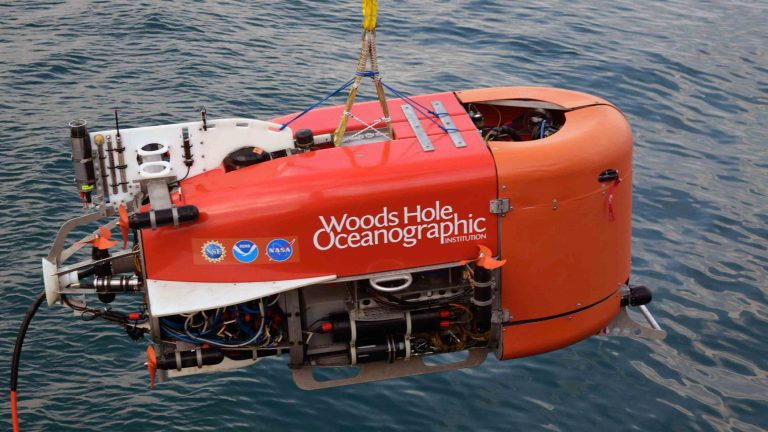
Foto: Evan Lubofsky, Instituição Oceanográfica Woods Hole.
O primeiro exemplo conhecido de um robô subaquático coletando uma amostra sedimentar de forma autônoma ocorreu em Kolumbo, um vulcão ativo a 500 metros de profundidade na ilha grega de Santorini, no mar Egeu.
O braço robótico que coletou a amostra para uma equipe internacional de pesquisadores foi montado em um veículo híbrido operado remotamente chamado Nereid Under Ice (NUI), desenvolvido pela Woods Hole Oceanographic Institution (WHOI) de Massachusetts.
“Para um veículo coletar uma amostra sem um piloto dirigindo, foi um grande avanço”, disse o cientista da WHOI, Rich Camilli. “Um dos nossos objetivos era jogar fora o joystick e conseguimos fazer exatamente isso.”
Os investigadores estavam a estudar o ambiente “adverso e carregado de produtos químicos” de Kolumbo e as suas formas de vida microbianas, ao mesmo tempo que exploravam até que ponto os robôs oceânicos poderiam explorar sem intervenção humana.
O NUI do tamanho de um carro inteligente emprega software de planejamento automatizado baseado em inteligência artificial, incluindo um planejador chamado Spock.
Isto permitiu-lhe decidir quais os locais vulcânicos a visitar e recolher amostras de forma autónoma, sugando-as através de uma “mangueira de amostragem”.
De acordo com o cientista da Universidade de Michigan, Gideon Billings, cujo código foi usado para coletar a primeira amostra, essa automação permitirá à NASA explorar mundos oceânicos além do nosso sistema solar.
“Se tivermos esta grande visão de enviar robôs para lugares como Europa e Encélado [as luas de Júpiter e Saturno, respectivamente], eles acabarão por precisar trabalhar de forma independente e sem a ajuda de um piloto”, disse ele.
11 de Janeiro de 2020
Pesquisas futuras, envolvendo também o Centro Australiano de Robótica de Campo, o Instituto de Tecnologia de Massachusetts e o Instituto Tecnológico Toyota em Chicago, incluirão treinamento robôs oceânicos para verem como pilotos de ROV, usando tecnologia de “rastreamento do olhar” e construindo uma interface de linguagem humana para permitir que os cientistas abordem os robôs diretamente, em vez de através de um piloto.
“Poderemos eventualmente ver uma rede de robôs oceânicos cognitivos onde há uma inteligência partilhada que abrange uma frota inteira, com cada veículo a trabalhar cooperativamente como abelhas numa colmeia”, disse Camilli. “Vai muito além de perder o joystick.”
O projeto foi financiado pela NASA e pela National Science Foundation National Robotics Initiative.

